Eight Spindles, Eight Threads: What Hargreaves' Loom Teaches Modern Concurrent Systems

Eight Spindles, Eight Threads: What Hargreaves' Loom Teaches Modern Concurrent Systems
In the winter of 1764, a carpenter and weaver from Stanhill, Lancashire, overturned a spinning wheel and watched the spindle continue to rotate in a vertical position. That observation — whether apocryphal or entirely factual — prompted James Hargreaves to construct the Spinning Jenny, a machine capable of drawing and twisting eight threads simultaneously from a single operator's motion. He did not have the vocabulary of computer science at his disposal, but the problem he solved was one that would occupy software engineers for the better part of the twentieth century: how do you manage multiple concurrent processes sharing a common resource without catastrophic failure?
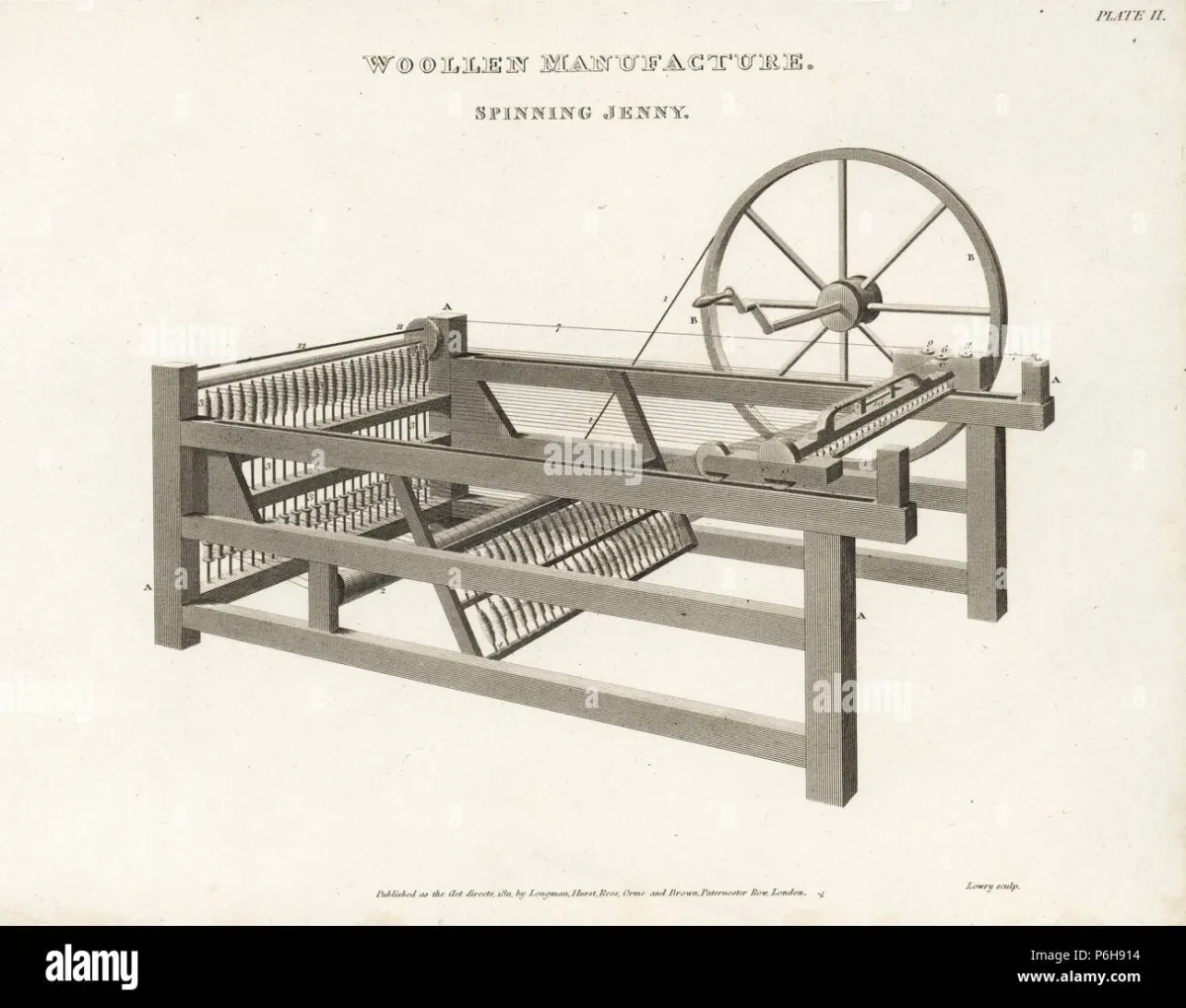 Photo: Spinning Jenny, via c8.alamy.com
Photo: Spinning Jenny, via c8.alamy.com
 Photo: Stanhill, Lancashire, via photos.francisfrith.com
Photo: Stanhill, Lancashire, via photos.francisfrith.com
 Photo: James Hargreaves, via www.westminstercollection.com
Photo: James Hargreaves, via www.westminstercollection.com
At Knight-Ware Labs, we find enduring value in examining the structural parallels between Britain's industrial ingenuity and the architectural challenges of modern software. The Spinning Jenny is, in this respect, an unusually instructive case study.
The Parallelism Problem, Stated in Wool
Prior to Hargreaves' invention, spinning was an inherently sequential process. A single spindle, driven by a single wheel, produced a single thread. Output was bounded by the fundamental constraint of one-at-a-time execution — a limitation that will be immediately recognisable to any developer who has wrestled with single-threaded bottlenecks in a high-throughput application.
The Jenny's breakthrough was not merely mechanical multiplication. Hargreaves had to ensure that eight spindles, each drawing fibre from a common roving, could operate in sufficient harmony to produce consistent yarn without tangling, breaking, or starving one another of material. The roving — the loose rope of prepared fibre fed into the machine — was the shared resource. Managing its distribution across eight simultaneous consumers was, in every meaningful sense, a resource contention problem.
Modern concurrent programming faces an equivalent challenge. When multiple threads compete for access to shared memory, a database connection pool, or a message queue, the consequences of poor coordination are precisely analogous: data corruption (the thread equivalent of tangled yarn), starvation (one thread monopolising the resource whilst others halt), and deadlock (two threads each waiting on a resource held by the other, producing total standstill).
Race Conditions and the Roving
A race condition occurs when the correctness of a programme depends upon the relative timing of operations across multiple threads — and that timing cannot be guaranteed. The result is non-deterministic behaviour: the system works correctly most of the time, fails occasionally, and reproduces the failure with maddening inconsistency.
Hargreaves encountered a mechanical analogue. If the carriage — the moving bar that drew the roving out to the correct length — advanced too quickly relative to the twist being applied by the spindles, the thread would snap. Move too slowly, and insufficient twist was imparted, producing weak, uneven yarn. The correct operation of the machine required that drawing and twisting proceed in a specific temporal relationship. When that relationship broke down, the output was ruined.
The solution Hargreaves arrived at was mechanical synchronisation: the carriage and the spindles were driven by a common mechanism, ensuring their operations were coupled rather than independent. This is precisely the principle behind mutex locks and semaphores in concurrent programming. By enforcing that certain operations occur in a defined sequence — or that a shared resource can only be accessed by one thread at a time — the developer imposes the same kind of mechanical coupling that Hargreaves built into his frame.
Deadlock Prevention: Lessons from the Mill Floor
Deadlock is the condition most feared by architects of concurrent systems. Two threads, each holding a lock the other requires, wait indefinitely for the other to release — producing a system that is technically running but entirely unproductive. It is the software equivalent of two mill workers, each holding a component the other needs to proceed, neither willing to set theirs down first.
Historical accounts of early spinning mills describe precisely this kind of operational deadlock. When multiple jennies shared a common preparation stage — the carding and roving processes that fed them — a bottleneck at any point could cascade backwards and halt the entire floor. Mill managers developed sequencing disciplines: a strict ordering of which machines were fed first, ensuring that the shared preparatory resource was never contested in a way that produced circular waiting.
This is lock ordering — one of the foundational deadlock prevention strategies in modern systems. By establishing a global ordering of resource acquisition and requiring all threads to acquire locks in that order, the circular dependency that produces deadlock is made structurally impossible. The principle is identical whether it is applied to a Lancashire mill floor in 1770 or a distributed microservices architecture in 2024.
Scaling the Frame: From Eight Spindles to Eight Hundred Threads
Hargreaves' original Jenny accommodated eight spindles. Later versions, produced commercially after his patent of 1770, extended this to eighty or more. The scaling challenge was non-trivial: increasing the number of concurrent spindles amplified every synchronisation problem that existed at eight. Small timing imperfections that were tolerable at small scale became catastrophic at large scale.
This scaling behaviour will be familiar to any engineer who has moved a system from modest concurrency to high parallelism. Thread contention that is negligible at ten concurrent users can become a systemic bottleneck at ten thousand. Lock granularity — the question of how large a section of shared state each lock protects — becomes critical. Coarse-grained locks, which protect large sections of state, reduce contention risk but limit parallelism. Fine-grained locks, which protect small sections, maximise parallelism but increase the complexity and risk of deadlock.
Hargreaves navigated an equivalent trade-off. A more rigid mechanical coupling between spindles reduced the risk of asynchronous failure but constrained the machine's adaptability to different yarn weights. Looser coupling offered flexibility but demanded greater operator skill to prevent the race conditions that snapped threads.
The Industrial Revolution as Computer Science Antecedent
It would be an overstatement to suggest that Hargreaves consciously theorised about concurrency. He was solving a practical problem with the materials and intuitions available to him. But the structural identity between his solutions and those formalised two centuries later in operating systems research is not coincidental — it reflects the fact that parallelism is a fundamental challenge in any system where multiple agents share finite resources.
Britain's Industrial Revolution produced an extraordinary concentration of engineers grappling with precisely these problems: Watt's governor managing feedback loops, Jacquard's loom implementing conditional logic in punch-card form, Brunel's block-making machinery demonstrating the benefits of standardised, interchangeable components. The vocabulary was mechanical, but the underlying logic was computational.
For software architects working in Britain today, there is both intellectual satisfaction and practical utility in recognising this lineage. The challenges of concurrent system design are not novel abstractions invented in American university computer science departments — they are problems that British engineers have been solving, in one form or another, for the better part of three centuries. The terminology has changed. The core discipline has not.
Practical Implications for Modern Development Teams
The Spinning Jenny's architectural lessons translate directly into contemporary practice. Shared resources must be identified explicitly and their access patterns analysed before concurrency is introduced — just as Hargreaves had to understand the roving's behaviour before designing the carriage mechanism. Thread communication should be minimised and made explicit, reducing the surface area for race conditions in the same way that mechanical coupling reduced the surface area for timing failures.
Perhaps most importantly, concurrent systems should be designed with the assumption that failure will occur and must be recoverable. A snapped thread on the Jenny did not destroy the machine — it was a recoverable fault, addressed by the operator and corrected. Modern concurrent architectures benefit from the same philosophy: isolation, graceful degradation, and the capacity to resume without global restart.
Hargreaves built his first Jenny from wood, with hand-carved components and a frame assembled in a domestic workshop. The elegance of the solution lay not in the materials but in the precision of the underlying logic. That is a principle worth carrying forward.